官方文档
http://doc.aldebaran.com/index.html
| 工具箱 | 适用对象 |
|---|---|
| NAOqi 1.14 | NAO V4 & V3 |
| NAOqi 2.1 | NAO V5 & V4 |
| NAOqi 2.8 | NAO V6 |
| NAOqi 2.4 & 2.5 | Pepper |
| QiSDK | Pepper SDK for Android |
| QiBuild | For C++ developers |
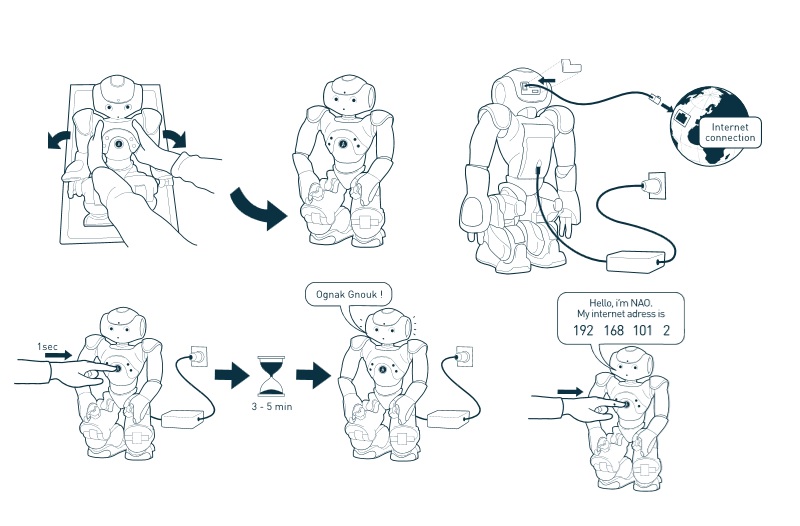
开箱
NAO的安全休息状态是跪姿,充电接口在背部,网络接口在后脑;胸部按钮长按开机,等待3-5min启动过程完成,直到机器人说“OGNAK GNOUK”;开机后点按一次胸部按钮报出IP地址,同一局域网电脑浏览器输入该IP地址登陆,账号和密码都是:nao,然后会有配置引导页面出现。
注意:不要改动账号密码,否则需要售后。
网络配置
1.使用有线或WiFi连接将NAO连接到计算机: 初始设置则必须用有线连接,即用网线连接到路由或者计算机,在同一局域网下获取机器人的IP地址,然后进入网页配置。
2.使用Choregraphe访问NAO网页: 启动Choregraphe。选择连接>连接到或单击连接按钮连接到按钮。显示连接到面板。右键单击绿色NAO,然后选择查看网页。
3.使用NAO的名称访问NAO网页: 打开网页浏览器。如果您知道NAO的主机名:在地址栏中键入:[naoHostName].local。默认情况下,它是:nao.local。 如果您不知道NAO的主机名:单击Bonjour图标。双击NAO的名字。
Windows 开发环境安装与配置
1.安装Python2.7。按安装向导提示安装python-2.7.x.xxx.msi,将python安装在C盘根目录下,从而保证在之后的qibuild的安装过程中能够找到指定目录。同时在系统和用户的PATH环境变量中添加相应的文件路径 C:\Python27 和 C:\Python27\Scripts ,如果还安装了其他版本的Python,确保2.7版本的顺序在其他版本之前。测试Python正常的方法是打开cmd,输入 python --version 显示版本号是2.7.x。
2.安装choregraphe-suite。下载 https://www.aldebaran.com/en/support/nao-6/downloads-softwares/former-versions 版本选择2.8.6,按安装向导提示安装。Choreography文档:http://doc.aldebaran.com/2-5/software/choregraphe/ ,第一次运行需要输入注册序列号,40位长,如654e-4564-153c-6518-2f44-7562-206e-4c60-5f47-5f45。
3.安装PyCharm-community: https://www.jetbrains.com/pycharm/download/。
4.安装NAOqi的Python库。解压 pynaoqi-python2.7-2.8.x.x-win64-vs2015-xxxxx.zip。简便起见,将文件夹重新命名为 pynaoqi,然后拷贝到C:/Python27/Lib/site-packages/路径下;
添加用户环境变量。变量名:PYTHONPATH, 变量值:C:\Python27\Lib\site-packages\pynaoqi\lib;测试库正常安装的方法是cmd里面输入python -c "import naoqi",正常情况下没有报错。
5.安装Visual Studio 2010。
6.安装Cmake3.12。向导安装过程中选择将Cmake路径添加到Path中。
7.安装qibuild。打开cmd窗口,使用pip命令安装qibuild。输入如下命令: pip install qibuild qibuild安装完成后,配置qibuild:qibuild config --wizard 在弹出菜单中选择安装的C++产生器版本。在后面的配置中,按提示信息分别选择IDE。配置完成后会生成 ~/.config/qi/qibuild.xml 配置文件,其中~为当前的worktree设置,如 C:/Users/Administrator。
8.安装C++SDK。解压缩naoqi-sdk-2.1.4.13-win32-vs2010.zip。创建空目录,如在D盘创建 D:/sdk。打开cmd窗口,进入新建目录,执行如下命令: qibuild init , 将解压缩内容放置所在目录拷贝到新建目录下。如解压缩目录为naoqi-sdk,将naoqi-sdk内容拷贝到 D:/sdk下。
远程登录NAO
NAO不能外接键盘,也不能外接显示器,但是NAO确实是一台计算能力和操作系统功能足够强的计算机。NAO提供了基于SSH(安全外壳协议)的远程登录(Telnet)和文件传输(Ftp)服务。通过远程登录和文件传输程序,可以象使用一台装有Linux操作系统的计算机那样使用NAO。
PuTTY是一套免费的SSH/Telnet程序,可以连接提供SSH/Telnet服务的主机。
WinSCP是一个Windows环境下使用的SSH的开源图形化SFTP客户端,同时支持SCP协议,主要功能是在本地与远程计算机间安全地复制文件,并且可以直接编辑文件
1.利用WinSCP下载上传文件
启动WinSCP,在登录窗口中选择SCP协议,输入NAO的IP地址,端口号选择22,用户名和密码都填nao,点击“登录”按钮,进入WinSCP主界面。登录后NAO的初始目录为“/var/persistent/home/nao”,与“/home/nao”目录的内容相同,用户nao对该目录具有读写权限。在WinSCP中通过在本地文件和NAO机器人文件间简单的“拖拽”操作就可以实现文件的上传和下载。选中目录中的文件,点击右键,在弹出菜单中,可以进行删除、重命名、更改文件属性等操作。
2.利用Putty远程登录NAO 启动Putty,在配置窗口中输入机器人IP地址,端口输入22(SCP协议端口),点击“打开”按钮,在弹出的窗口中输入用户名nao和密码nao,进入NAO的远程控制状态。
监控NAOqi:NAOqi是机器人运行的主要软件。NAOqi不运行,机器人的任何行为都无法完成。在机器人启动过程中,NAOqi会自动启动,脚本/etc/init.d/naoqi管理NAOqi的启动过程。
控制NAOqi的命令包括如下4条:nao start、nao stop、nao restart和nao status。
3.Python库安装
pip是Python中常用的包管理工具,在NAO机器人预装的Python2.7安装包中,pip不是默认安装的。
(1)下载pip安装文件。下载地址:https://pypi.python.org/packages/source/p/pip/pip-10.0.1.tar.gz
(2)将下载到本地的pip-10.0.1.tar.gz利用WinSCP上传到NAO的/home/nao目录下。
(3)登录Putty,使用su命令将用户由nao切换到root,密码为root。root用户对“/usr/lib/ python2.7/site-packages”目录拥有写权限。
(4)在NAO上运行如下命令:
tar -xzvf pip-10.0.1.tar.gz
cd pip-10.0.1
python setup.py install
tar是linux的解压缩命令,运行后将pip安装文件解压缩到/home/nao/pip-10.0.1目录下,文件中包括pip的安装文件setup.py。最后利用python运行setup.py完成安装。安装完成后,可以在NAO的Python库目录“/usr/lib/python2.7/site-packages”下看到新安装的pip相关目录。 pip安装完成后,可以利用如下命令完成其他python包的安装:
pip install 包名
4.在虚拟机中编译程序
由于NAO的存储空间有限,NAO机器人系统中并不包含gcc一类编译程序。NAO在虚拟机系统中提供了编译环境,对于需要经过编译后才能进行安装的程序,可以先在虚拟机中编译,再安装到实际系统中。
Choregraphe编程基础
Choregraphe中的指令盒有四种类型
- Python语言指令盒:使用Python语言编写,可以自定义构造方法、装载方法、缷载方法、输入和输出事件,Choregraphe提供的基本指令盒大部分属于Python语言指令盒,如“Stand up”、“Sit Down”等动作指令盒。
- 流程图指令盒:指令盒的数量比较多时,可以使用流程图指令盒将若干相互连接的指令盒合并到同一个指令盒中,获得一个可读性更强的流程图,简化程序。
- 时间轴指令盒:包含一个时间轴,在这个时间轴上可以储存关节值,以关键帧的形式定义和编写各种动作。
- 对话指令盒:使机器人完成一些预定义的简单对话,支持中英文等多种语言。
指令盒所建立的类MyClass父类为GeneratedClass,在类的构造方法中调用父类的构造方法GeneratedClass.__init__(self)。除了构造方法外,MyClass类中也定义了一些其他方法,这些方法所对应的事件产生的前后次序为:
①__init__(self):指令盒构造方法,创建指令盒对象时调用。
②onLoad(self):指令盒对象载入方法。
③onInput_onStart(self):指令盒处理外部输入方法,收到外部输入信号时调用。
④onUnload(self):指令盒对象卸载方法,在销毁指令盒对象时调用。
输入点和输出点对应的方法命名具有一定规则,如名称为onStart的输入点对应的方法是onInput_onStart。在开始信号(激活信号)输入到onStart输入点时,将调用onInput_onStart方法。onStopped输出点调用的方法为onStopped(),激活指令盒输出。
NAO编程基础
NAOqi操作系统
NAO机器人使用NAOqi系统,它是一个专为满足 Aldebaran 机器人需求而开发的嵌入式基于Gentoo的 GNU/Linux 发行版。NAOqi为操作NAO机器人提供了一组应用程序接口(API)。使用Python或C++可以调用API。
NAOqi提供了操作机器人的核心API,提供了数以千计的在控制运动、语音、视频等方面的函数,可以满足机器人在资源、事件、并行、同步等方面的一般需要。
NAOqi是跨平台的,支持在Linux、Windows和MacOS平台上使用Python、C++、JAVA等语言编程。 尽管NAOqi的动作、音频、视频等不同模块差异很大,NAOqi使用结构一致的数据模型来表示信息,为调用不同模块设计了相同的编程模式,各个模块与ALMemory信息共享使用相同的结构,这些都降低了NAO程序设计的复杂性。
大部分情况下,熟悉C++的开发者应该用C++写模块,用Python写行为控制。
NAOqi进程
在NAO上执行NAOqi是通过一个代理程序Broker完成的。启动机器人时,代理程序会自动加载/etc/naoqi/ autoload.ini文件,autoload.ini文件中指定了需要加载NAOqi的哪些库,这些库文件位于/usr/lib/naoqi目录下。
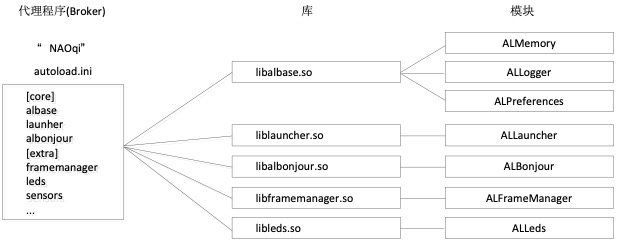
一个库包含一个或者多个模块,加载的模块形成了一种树型结构。
每个模块类都定义了多种方法。例如,NAO的运动功能都放在ALMotion模块中,让机器人完成移动、转头、张手等动作分别要调用ALMotion模块的moveto()、setAngles()、openHand()等方法。
使用NAOqi模块时,不需要像普通Python程序那样用import语句导入所用模块。模块通过Broker通告它所提供的方法。通过Broker,任何模块都可以找到所有己经通告的模块及方法。
Broker主要有两个作用:
(1)直接服务,查找模块和方法;
(2)网络访问,从Broker进程外部调用模块方法。Broker既是一个可执行程序,也是一个服务器,可以对指定的IP和端口监听远程命令。远程计算机、其它机器人、机器人自身的程序(Broker的外部进程)都可以使用IP地址和端口,调用模块及方法。也就是说,通过IP和端口调用NAOqi模块的程序,既可以在机器人上运行,也可以在远程计算机上直接运行。
Broker是透明的。大部分情况下,编程时可以不考虑Broker,调用本地模块的代码与调用远程模块的代码是一样的。
NAOqi模块
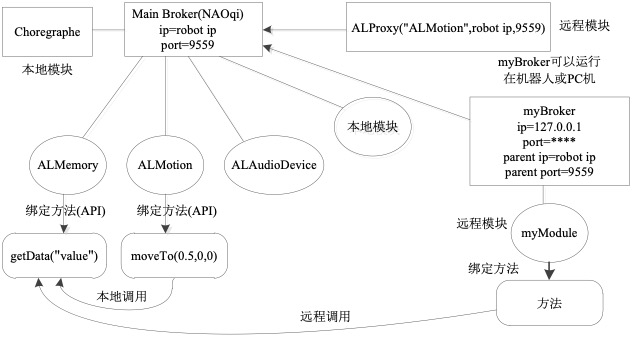
NAOqi模块可以在同一进程(NAOqi进程)内部调用,也可以通过网络调用,为使编程模式统一,NAO使用代理(Proxy)方式调用NAOqi模块。 为一个模块创建Proxy对象后,Proxy对象就代表了这个模块。
# 让NAO说话(say.py)
from naoqi import ALProxy
tts = ALProxy("ALTextToSpeech", "192.168.1.170", 9559)
# 将"192.168.1.170"替换成自己机器人IP
tts.say("Hello, world!")
说明:
ALProxy类用于创建模块的代理对象。
ALTextToSpeech是NAOqi中将文本转换为语音的模块。ALTextToSpeech模块的代理对象tts创建后,tts就代表了ALTextToSpeech模块,可以直接使用其所有方法。
say方法,实现“说话”。程序中并没有指出ALTextToSpeech模块所在位置,对模块及say方法的查找由Broker完成。
程序运行前,需要确保计算机与机器人之间网络是连通的(可以使用ping命令进行测试)。
say.py可以在计算机上运行(在PyCharm中直接运行),也可以将其上传到机器人的/home/nao目录下,在机器人上运行。 程序运行时,可以听到NAO发出的语音。
ALProxy类创建代理对象有两种方法:
(1)class ALProxy(name,ip,port)
- name:调用的模块名。
- ip:机器人使用的IP地址。
- port:端口,默认为9559。
(2)class ALProxy(name)
- name:调用的模块名。
方法2中只使用模块的名称。在这种情况下,正在运行的代码和要连接的模块必须位于同一代理(Broker)中。在使用Choregraphe编程时,由于Choregraphe会将所写程序上传到机器人并做相应设置,使其能直接调用NAOqi模块,所以创建模块代理时使用的是方法2。
阻塞和非阻塞调用
NAOqi的方法从调用时间上看大体上可以分为两类,如读传感器状态getData()方法(属于ALMemory模块)可以很快完成;让机器人移动到某个位置的move()方法(属于ALMotion模块)要执行很长时间。
在move()方法调用过程中,机器人可能还需要做其它的事,如用“眼睛”看,或者“说话”,因此,在调用move()方法时,还需要同时调用其它方法。
NAOqi提供了两种调用方式:
(1)阻塞调用:阻塞调用是指调用结果返回之前,调用者会进入阻塞状态等待。只有在得到结果之后才会返回。也就是说,在顺序结构的程序中,只有在前一个调用结束后才能执行下一条语句。
所有的阻塞调用都可以引发异常,应该使用try-catch结构捕获异常。调用可以有返回值。
对于NAOqi任何阻塞调用方法,如果使用Proxy的post对象进行调用,将在并行线程中创建任务,这样可以同时执行后面的语句。
(2)非阻塞调用:指在不能立刻得到结果之前,该方法不会阻塞当前线程,而会立刻返回。这样就可以继续执行下面的语句。
# 让NAO说话与行走
from naoqi import ALProxy
import time
#将"192.168.1.170"替换成自己机器人IP
motion = ALProxy("ALMotion", "192.168.1.170", 9559)
tts = ALProxy("ALTextToSpeech", "192.168.1.170", 9559)
motion.setStiffnesses("Body", 1.0)
time.sleep(1.0)
motion.moveInit()
#使用Proxy的post对象进行调用
motion.post.moveTo(0.5, 0, 0)
tts.say("I'm walking")
上述代码首先创建了ALMotion运动模块和ALTextToSpeech语音模块的代理对象,例中调用了如下几种方法:
- setStiffnesses():设置关节的刚度(电机的转矩限制),刚度为0时关节做不了任何运动,非阻塞调用。
- moveInit():运动进程的初始化,检查机器人的当前状态,并选择一个正确的姿势,阻塞调用。
- moveTo():移动到指定坐标位置,阻塞调用。
- setStiffnesses()方法为非阻塞调用方法,由于关节的刚度设置需要一定的时间(几毫秒),如果不经过time.sleep(1.0)延迟,调用moveInit()时,各关节的刚度不一定都已经设置为1.0,moveInit方法将不会正确执行。
- moveInit()为阻塞调用方法,完成机器人行走前的准备动作。例如,如果机器人初始状态为休息状态,调用moveInit方法后,机器人进入准备行走状态(站立、屈膝)。moveInit方法的最长执行时间会超过1秒,方法执行完成后,才会执行moveTo()方法。
- moveTo()为阻塞调用方法,使用post对象调用moveTo()方法,将创建新的并行线程,在新线程中调用moveTo()方法,原线程继续调用后面的say方法。 程序执行结果:机器人一边向前走,一边说I’m walking,在0.5米处停止。
NAOqi内存管理
NAOqi各个模块间是通过内存交换数据的。管理内存的是ALMemory模块。
内存中的数据大体上可以分为两类:
(1)NAO的状态数据,包括执行器和传感器的数据。 NAO安装了几十个传感器,NAOqi周期性地调用各种传感器驱动程序接口,将传感器值写到内存中。其他模块可以读内存中当前状态下传感器值。 例如,在调用ALMotion模块的moveTo()方法时,NAO在向前走的过程中,会不断读取位置传感器、惯性传感器、压力传感器的取值,根据当前状态和行走距离调整步态,最后在向前走0.5米后停止。
# 例:读取NAO行走过程中的加速度计取值
from naoqi import ALProxy
import time
motion = ALProxy("ALMotion", "192.168.1.170", 9559)
memory=ALProxy("ALMemory","192.168.1.170",9559)
motion.setStiffnesses("Body", 1.0)
time.sleep(1.0)
motion.moveInit()
motion.post.moveTo(0.5, 0, 0)
for i in range(0,40):
print memory.getData(
"Device/SubDeviceList/InertialSensor/AccelerometerX/Sensor/Value")
time.sleep(0.2)
为了在运动过程中读取加速度计传感器的取值,使用非阻塞调用方式调用moveTo()方法。ALMemory模块的getData方法从内存中读取执行器/传感器的取值。
ALMemory以无序映射(unordered_map)的方式存储数据,每个数据是一个键/值对。
NAOqi为每个执行器/传感器定义了一个名称,getData方法以此名称为键,在内存中读取相应值。
Device/SubDeviceList/InertialSensor/AccelerometerX/Sensor/Value表示X轴加速度传感器。
完整的键表见 NAO V6 Actuator & Sensor list 和 Pepper Actuator & Sensor list。
(2)订阅的事件/微型事件数据。像人脸识别等模块,由于处理过程运算量非常大,NAOqi只在订阅这些功能时才向内存中写数据,而不会象传感器那样周期性地写数据。订阅的模块运行完成后将以事件的方式通知NAOqi。
订阅数据也通过键从内存中读取,各订阅模块产生的数据通常使用列表表示,列表元素是其他类型或列表。
自定义Python模块
NAOqi模块都是库中的类。从autoload.ini加载库时,这些模块类将自动实例化。 除了使用NAOqi模块外,也可以自定义模块。自定义模块类的基础类是ALModule。从ALModule派生的类,可以“绑定”方法。模块名称和方法将被通告给代理,这样其他模块就可以使用自定义模块了。
1.模块分类
自定义模块可以是远程模块也可以是本地模块。如果是远程的,在机器人外部运行。远程模块可以从外部调试,但在速度和内存使用方面效率较低。如果是本地的,在机器人本地运行。本地模块比远程模块效率高。
每个模块都可以包含多种方法,某些方法可以限定为从模块外部调用。不管模块是远程的还是本地的,调用这些限定方法的方式是一样的。
本地模块是在同一进程中启动的两个(或更多)模块,本地模块由NAOqi作为代理(Broker),统一管理,可以共享变量,可以直接调用彼此的方法。在做一些闭环控制时,必须使用本地模块。
远程模块使用网络进行通信。远程模块需要代理与其他模块通信。Broker负责所有网络通信。
2.远程模块的连接
远程模块可以通过使用代理方法,将其代理连接到其他模块的代理上,实现与其他模块通信。连接方式如图所示,可以是:Broker到Broker;Proxy到Broker
3.ALModule方法 ALModule模块类是自定义模块类的基类,负责为其子类通告方法。
4.自定义Python模块
(1)创建自定义模块
主要分以下两步:
①以ALModule为基类创建自定义类,定义方法和事件处理方法,绑定事件。
绑定事件使用ALMemory模块的subscribeToEvent(name, callbackModule,callbackMethod)方法,
- name 为事件名称
- callbackModule 为调用事件的模块(实例)名称
- callbackMethod 为事件处理方法
②创建Broker代理,创建自定义模块类实例,进入循环状态,等待事件发生或其他模块调用。
# myModule.py
import sys
import time
from naoqi import ALProxy
from naoqi import ALBroker
from naoqi import ALModule
HumanGreeter = None
memory = None
class HumanGreeterModule(ALModule):
def __init__(self, name):
ALModule.__init__(self, name)
self.tts = ALProxy("ALTextToSpeech")
global memory
memory = ALProxy("ALMemory")
memory.subscribeToEvent("FrontTactilTouched", "HumanGreeter", "onFrontTactilTouched")
def onFrontTactilTouched(self, *_args):
memory.unsubscribeToEvent("FrontTactilTouched", "HumanGreeter")
self.tts.say("Hello, you touch me")
memory.subscribeToEvent("FrontTactilTouched", "HumanGreeter",
"onFrontTactilTouched")
def myMethod(self):
self.tts.say("hello")
def main(IP):
myBroker = ALBroker("myBroker", "0.0.0.0", 0,IP , 9559)
global HumanGreeter
HumanGreeter = HumanGreeterModule("HumanGreeter")
try:
while True:
time.sleep(1)
except KeyboardInterrupt:
print "Interrupted by user, shutting down"
myBroker.shutdown()
sys.exit(0)
if __name__ == "__main__":
main("127.0.0.1")
上述程序中,HumanGreeterModule类的模块实例为HumanGreeter,FrontTactilTouched为触摸头部前传感器时产生的事件,subscribeToEvent方法将该事件与onFrontTactilTouched方法绑定在一起,将其作为事件处理方法。
创建myBroker时使用本机地址(0.0.0.0),本地随机可用端口(0),父Broker为naoqi,地址为机器人IP,端口号为9559。main方法中的参数127.0.0.1为程序在机器人上运行时的地址,如果在计算机上运行,地址应改为机器人IP。
程序运行后,触摸头部前传感器,NAO将说”Hello, you touch me”。
(2)调用自定义模块
自定义模块运行后,其他模块可以对其方法进行调用。
在Choregraphe中调用HumanGreeter模块实例方法
# Choregraphe 里面新建Python指令盒
class MyClass(GeneratedClass):
def __init__(self):
GeneratedClass.__init__(self)
self.mymodule=ALProxy("HumanGreeter")
def onLoad(self):
pass
def onUnload(self):
pass
def onInput_onStart(self):
self.mymodule.myMethod()
pass
def onInput_onStop(self):
self.onUnload()
self.onStopped()
(3)自启动自定义模块
①使用WinScp在/home/nao目录下创建mymodule子目录,将myModule.py上传到该子目录下。
②修改/home/nao/naoqi/preferences/autoload.ini。
# autoload.ini
#
# Use this file to list the cross-compiled modules that you wish to load.
# You must specify the full path to the module, python module or program.
[user]
#the/full/path/to/your/liblibraryname.so # load liblibraryname.so
[python]
#the/full/path/to/your/python_module.py # load python_module.py
/home/nao/mymodule/myModule.py
[program]
#the/full/path/to/your/program # load program
③重新启动机器人,将自动运行 mymodule.py。
Linux C++ SDK 安装指南
http://doc.aldebaran.com/2-8/dev/cpp/install_guide.html
支持的操作系统: Linux Ubuntu 16.04 Xenial Xerus - 64bits
Windows 系统的局限性:
- C++ 交叉编译工具(用于编译机器人上运行的代码)在Windows系统上不支持。
- Windows 架构:编译时需要针对32位编译,虽然这两种架构(32位和64位)都支持运行您喜欢的IDE,但必须专门针对32位进行编译。生成的代码也将在32位或64位环境中运行。
1.支持的编译器和 IDE
- GCC 4.8.2 或更高版本.
安装 GCC (提前于其他工具),使用:
$ sudo apt-get install build-essential
- 你喜欢的 IDE 或编辑器。
提示:不知道选择什么?
- 推荐最新版本的 QtCreator 。
- 也可以用 Eclipse,如果你已经习惯了 。
2.安装 qiBuild。
为什么安装 qiBuild?
我们需要(在你的计算机上)编译代码,在另一个操作系统(在机器人上)下运行,所以需要交叉编译。qiBuild 基于 CMake,是用于生成跨平台工程的工具。CMake 为任何操作系统生成 makefile 和 Workspaces,使项目能够在Windows、Mac、Linux和 NAOqi 操作系统上简单编译。
3.准备工作
- CMake
使用系统支持的版本号,保证为 2.8.12 或更高
Tips: 检查 CMake 版本:
$ cmake --version如果不存在,使用以下命令安装:
$ sudo apt-get install cmake - Python 2.7
Tip: 检查 Python 版本:
$ python --version
4.安装
- 使用 pip 安装 qibuild.
建议是使用参数 –user 安装,保持系统环境的清洁。
$ pip install qibuild --user将 $HOME/.local/bin 添加到 $PATH,一种做法是在 ~/.bashrc 文件的末尾添加一行:
PATH=$PATH:$HOME/.local/bin
5.配置 运行:
$ qibuild config --wizard
按照提示配置:
- CMake 路径 (如果没有检测到)
- CMake 生成器,
Found CMake: /usr/bin/cmake :: Please choose a generator 1 Unix Makefiles (default) 2 Ninja 3 Watcom WMake 4 CodeBlocks - Ninja 5 CodeBlocks - Unix Makefiles 6 CodeLite - Ninja 7 CodeLite - Unix Makefiles 8 Eclipse CDT4 - Ninja 9 Eclipse CDT4 - Unix Makefiles 10 KDevelop3 11 KDevelop3 - Unix Makefiles 12 Kate - Ninja 13 Kate - Unix Makefiles 14 Sublime Text 2 - Ninja 15 Sublime Text 2 - Unix Makefiles > 1 - IDE
:: Please choose an IDE 1 None (default) 2 QtCreator 3 Eclipse CDT > 2 :: Found QtCreator: /usr/bin/qtcreator :: Do you want to use qtcreator from /usr/bin/qtcreator? Answer 'no' if you installed qtcreator from Nokia's installer (Y/n) > y - 重复配置会出现
:: Found a worktree in /home/nao/Downloads/mywtree :: Do you want to configure settings for this worktree? (y/N) > y :: Found the following build configs: sys-linux_x86_64 :: Use one of these build configs by default (Y/n) > y :: Choose a build config to use by default 1 sys-linux_x86_64 (default) > 1 :: Do you want to use a unique build dir? (mandatory when using Eclipse) (y/N) > n建议在 Linux 上使用 ‘Unix Makefiles’,在 Windows 上使用 ‘Visual Studio’。 注意,你可以在任何时候再次运行上述配置引导。 结果:生成了一个配置文件 ~/.config/qi/qibuild.xml. 它被所有我们创建的工作树 (worktree) 共享。
6.工作树初始化
- 创建一个空的文件夹作为工作树。暂时称之为: /path/to/myWorktree
- 在这个空文件夹内打开终端,输入以下命令初始化工作树:
$ qibuild init
7.最后检查 创建一个样本来检查一切是否正常。 如果你想:
- 快速检查, 试试: C++ SDK - Hello world (auto-generated).
- 理解所有实现的所有细节,试试: C++ SDK - Hello world (step by step) http://doc.aldebaran.com/2-8/dev/cpp/helloworld_detailed.html.
8.安装和配置 NAOqi SDK
-
获取 C++ SDK
下载 C++ SDK 压缩包:
naoqi-sdk-x.x.x-[OS].tar.gz(Windows 是naoqi-sdk-x.x.x-win32-[visualStudioversion].zip)可以在开发者中心下载到最新的发行版,注意选择的版本需要对应操作系统。
-
在你的机器上解压缩. 假设解压得到的文件夹命名为: naoqi-sdk.
-
创建你的工具链
输入以下命令利用 C++ SDK 创建工具链(toolchain):
$ qitoolchain create linux /home/nao/Downloads/naoqi-sdk/toolchain.xml其中 linux” 是你想给这个工具链取的名(你可以有多个工具链), /home/nao/Downloads/naoqi-sdk/toolchain.xml 是 C++ SDK 内 toolchain.xml 的路径。
- 进入你的工作树:
$ cd /path/to/myWorktree - 创建配置
输入以下命令来创建一个与这个工具链对应的编译配置,并将此配置作为当前工作树的默认配置:
$ qibuild add-config sys-linux_x86_64 -t linux --default
C++ SDK - Hello world (auto-generated)
1.在你的工作树里输入:
$ qisrc create myFirstExample
结果:创建了一个”myFirstExample“的目录,里面生成了一个”hello world“。
2.进入这个目录
$cd myfirstexample
输入
$qibuild configure
结果: 创建了一个 “build-<myconfig>” 目录, 其中 <myconfig> 送对应了当前的配置。例如 build-sys-linux-x86_64。
3.编译 ”hello world“ 程序,使用:
$ qibuild make
4.运行 ”hello world“ 程序,例如,进入 build-<myconfig>/sdk/bin 目录
cd build-<myconfig>/sdk/bin
然后输入:
./my_first_example
C++ SDK - Hello world (step by step)
http://doc.aldebaran.com/2-8/dev/cpp/helloworld_detailed.html
使用qibuild编译远程C++模块
C++和Python调用NAOqi的编程方法是相同的,使用模块代理方式调用模块方法。 qibuild是一种使工程编译变得更加简单的工具,管理工程的各种依赖,支持交叉编译。 NAO开发文档中推荐使用qibuild进行程序编译。 1.sayhelloworld示例 使用say方法发声(NAOqi c++ SDK示例,文件名sayhelloworld.cpp)
// sayhelloworld.cpp
#include <iostream>
#include <alerror/alerror.h>
#include <alproxies/altexttospeechproxy.h>
int main(int argc, char* argv[])
{
if(argc != 2) {
std::cerr << "Wrong number of arguments!" << std::endl;
std::cerr << "Usage: say NAO_IP" << std::endl;
exit(2);
}
const std::string phraseToSay = "Hello world";
try {
AL::ALTextToSpeechProxy tts(argv[1], 9559);
tts.say(phraseToSay);
} catch (const AL::ALError& e) {
std::cerr << "Caught exception: " << e.what() << std::endl;
exit(1);
}
exit(0);
}
2.CMake、qibuild 按附录A所示步骤安装好C++开发环境,需要的软件包括Visual studio 2010、CMake、qibuild、NAOqi C++ SDK。各部分作用及关系如下:
(1)C++程序是由数量众多的.h和.cpp文件通过编译器生成的,大量的源码文件需要使用项目工程来构建和管理。Visual studio 2010或其更高版本是windows下的开发工具,使用项目文件,完成复杂项目的管理与编译。
(2)CMake是一个跨平台的软件,能够输出各种各样的makefile或者project文件。需要要编写CMakeLists.txt文件,它是CMake所依据的规则。
(3)qibuild工具提供了一组命令,调用CMake的API,可以顺利配置编译出我们想要的IDE工程。
在SDK的sayhelloworld示例中,CMakeLists.txt内容为:
CMakeLists.txt(sayhelloworld)
cmake_minimum_required(VERSION 2.6.4 FATAL_ERROR)
project(sayhelloworld)
find_package(qibuild)
qi_create_bin(sayhelloworld sayhelloworld.cpp)
qi_use_lib(sayhelloworld ALCOMMON ALPROXIES)
在CMakeLists.txt中,指定了项目名称、二进制文件对应的主程序、使用的类库等内容。
3.编译
以下编译过程均为cmd窗口中命令行操作方式。
(1)第一次运行qibuild要进行初始化设置,为CMake指定生成项目类型(makefile/project)及IDE类型。参见附录A。
qibuild config --wizard
(2)创建一个工作路径,即 worktree。
新建一个空目录,如d:/sdk。在cmd窗口中进入该目录(在资源管理器中打开目录,按shift键同时右击,选择“在此处打开命令窗口”)。执行命令:
qibuild init
命令执行后,sdk目录被设为工作路径,目录下新生成一个.qi目录。
在sdk目录下新建naoqi-sdk目录,将naoqi-sdk-2.1.4.13-win32-vs2010.zip解压缩内容拷贝到该目录下,包括bin、etc、include目录等。
(3)编译。执行如下命令:
cd d:/sdk/naoqi-sdk/doc/dev/cpp/examples
qitoolchain create mytoolchain d:/sdk/naoqi-sdk/toolchain.xml
qibuild add-config mytoolchain -t mytoolchain --default
cd core/sayhelloworld
qibuild configure
此时,生成vs2010项目文件,build-mytoolchain目录下文件如图所示。
执行qibuild make命令生成可执行程序;
或者使用Visual Studio打开解决方案文件sayhelloworld.sln,在解决方案资源管理器中将sayhelloworld设置为启动项目,最后生成sayhelloworld可执行程序。生成的sayhelloworld.exe位于build-mytoolchain/sdk/bin目录下。
(4)运行。在命令窗口中进入build-mytoolchain/sdk/bin目录,执行:
sayhelloworld 192.168.1.170
机器人将输出语音hello world。其中192.168.1.170为机器人的IP地址,作为main函数的参数直接用于生成ALTextToSpeech模块代理的IP参数。
使用Visual Studio高版本时,如果编译时出错,可以在项目属性窗口设置中将 常规 - 平台工具集 设置为Visual Studio 2010,如图所示。Visual Studio 2010平台工具集选项如果不存在,可以同时安装VS2010和高版本VS。
在qibuild项目中使用Python
http://doc.aldebaran.com/qibuild/beginner/qipy/tutorial.html
注意:这篇文章主要介绍了 Swig 包装 C++ 库,使用 qibuild 构建 Python 扩展,使用qipython 运行脚本的方法。但是 qibuild(v3.18) 似乎没有 qi_swig_python 这个 api,所以没有测试成功。—— 2023.06
项目结构
假设您有一个名为foo的C++库,位于qibuild项目中。
<worktree>
|__ foo
|__ qiproject.xml
|__ CMakeLists.txt
|__ foo.cpp
|__ foo.hpp
代码在 foo.zip 中,包含以下内容:
<worktree>/foo/CMakeLists.txt
cmake_minimum_required(VERSION 2.8)
project(foo)
find_package(qibuild)
qi_create_lib(SHARED foo foo.hpp foo.cpp)
<worktree>/foo/qiproject.xml
<project version="3">
<qibuild name="foo" />
</project>
您希望编写一个C++ Python扩展,用于包装foo库,并使用qibuild构建系统。假设您使用swig来实现这一点。
您有一个用于swig的接口文件pyfoo.i,将生成一个名为_pyfoo.so的Python扩展,以及一个foo.py用于包装C++扩展。
新建文件夹pyfoo,内部文件结构如下:
<worktree>
|__ foo
|__ qiproject.xml
|__ CMakeLists.txt
|__ foo.cpp
|__ foo.hpp
|__ pyfoo
|__ qiproject.xml
|__ CMakeLists.txt
|__ pyfoo.i
|__ foo.py
|__ foo_script.py
代码在 pyfoo.zip 中,包含以下内容 qiproject.xml
<project version="3">
<qibuild name="pyfoo">
<depends runtime="true" buildtime="true" names="foo" />
</qibuild>
<qipython name="pyfoo">
<setup with_distutils="true" />
</qipython>
</project>
CMakeLists.txt
cmake_minimum_required(VERSION 2.8)
project(pyfoo)
qi_swig_python(_pyfoo pyfoo.i DEPENDS FOO)
pyfoo.i
%module _pyfoo
%{
include "foo.hpp"
%}
%include "foo.hpp"
foo.py
import _pyfoo
...
foo_script.py
import foo
...
def main():
....
if __name__ == "__main__":
main()
您希望能够构建pyfoo扩展,并直接使用 foo-script.py,而无需设置PYTHONPATH为<worktree>/pyfoo/build-linux64/sdk/lib之类的内容。
为了实现这一点,您可以为Python项目(pyfoo)编写一个setup.py,并使用qipy来运行脚本。
在底层,所有操作都将使用virtualenv和distutils完成。
一些有用的链接:
步骤一:基本检查
确保在运行qipy list时,您的项目出现在列表中,并且扩展已构建:
qibuild configure pyfoo
qibuild make pyfoo
步骤二:编写setup.py文件(可选)
为您的Python项目(pyfoo)编写setup.py文件,以管理安装和分发:
在pyfoo/setup.py
import os
from setuptools import setup
setup(
name="mymodule",
version="0.1",
py_modules=['foo'],
entry_points={
"console_scripts": [
"pyfoo = foo_script:main"
]
}
)
步骤三:使用qipy bootstrap
使用qipy bootstrap在工作树中初始化一个virtualenv。这一步应在更改或添加新的Python项目时运行。
qipy bootstrap
步骤四:使用virtualenv
使用qipy run代替python来执行您的Python脚本。这将激活virtualenv,并以适当的环境运行Python脚本。
qipy run [-c config] foo_script.py
如果您有多个命令要运行,您可以使用以下命令在当前会话中激活virtualenv:
source $(qipy sourceme -q)
步骤五:添加Python测试(可选)
建议使用pytest来运行您的测试。您可以使用以下命令运行pytest:
cd /path/to/project
qipy run -- py.test -- [OTHER py.test args]
如果在运行测试时遇到段错误(在编写C++ Python扩展时可能发生),可以在gdb中运行pytest:
source $(qipy sourceme -q)
gdb /path/to/worktree/.qi/venv/py-<config>/bin/python
run -m pytest
实际测试
运行 qibuild configure pyfoo命令得到报错,
CMakeLists.txt:5 qi_swig_python(_pyfoo pyfoo.i DEPENDS FOO)
报错,提示:
$ qibuild configure pyfoo
...
-- Detecting CXX compile features - done
CMake Error at CMakeLists.txt:5 (qi_swig_python):
Unknown CMake command "qi_swig_python".
-- Configuring incomplete, errors occurred!
[ERROR]: ConfigureFailed Error occurred when configuring project pyfoo
查询 QIBUILD 手册 发现确实没有 qi_swig_python 这个命令,但是有 qi_swig_wrap_python 这个命令,描述为
qi_swig_wrap_python(module_name interface_file [SRC <src> ...]
[DEPENDS <depends> ...]
[SUBFOLDER <subfolder> ...]
)
创建C/C++库的python包装。 参数:
- module_name – 目标名称
- interface_file – swig接口文件(扩展名为.i)
- SRC – 源文件列表
- DEPENDS – 依赖项列表
- SUBFOLDER – 将构建模块的子文件夹。用于将包装添加到现有包中。
怀疑是 qi_swig_python 命令被更名了,于是将 CMakeLists.txt 中的 qi_swig_python 改为 qi_swig_wrap_python,再次运行 qibuild configure pyfoo,报错如下:
CMake Error at CMakeLists.txt:5 (qi_swig_wrap_python):
Unknown CMake command "qi_swig_wrap_python".
再一次报错,提示 qi_swig_wrap_python 命令不存在。
切换 qibuild==3.13(Python3支持的最低版本)重新测试,报错类似。
因此,目前尚无解决方案。
扩展NAO API
(1)使用qibuild创建模块框架。
进入要在其中创建项目的worktree,输入:
qisrc create mymodule
在worktree/mymodule中创建一个新项目。生成的内容:
- CMakeLists.txt:CMake读取该文件以生成makefile或Visual Studio解决方案。
- main.cpp:只是一个标准的“Hello World”。
- qibuild.cmake:CMakeLists.txt包含此文件才能找到qiBuild CMake框架。
- qibuild.manifest: qiBuild使用文件信息构建项目。
(2)在CMakeLists.txt中声明依赖关系。 由qisrc生成的CMakeLists.txt内容如下:
CMakeLists.txt
cmake_minimum_required(VERSION 2.8)
project(mymodule)
include("qibuild.cmake")
qi_create_bin(mymodule "main.cpp")
与naoqi通信,需要在代码中使用代理。代理在ALCommon库中。需要在CMakeLists中导入ALCommon。
在CMakeLists.txt中添加:
qi_use_lib(<your_project_name> <library_you_want_use_1> <library_you_want_use_2>)
CMakeLists.txt
cmake_minimum_required(VERSION 2.8)
project(mymodule)
include("qibuild.cmake")
qi_create_bin(mymodule "main.cpp")
qi_use_lib(myproject ALCOMMON ALPROXIES)
由qisrc生成的生成的main.cpp文件是标准的main.cpp,只在标准输出上打印一个“Hello,world”。
扩展main.cpp使之能与NAOqi进行通信,并从NAOqi的模块调用bind函数。 使用–pip和–pport选项实现命令行参数输入; 为使用的模块创建代理,包含<alcommon / alproxy.h>。
// main.cpp
#include <iostream>
#include <stdlib.h>
#include <alcommon/alproxy.h>
#include <alcommon/albroker.h>
int main(int argc, char* argv[])
{
...
}
(3)创建远程模块。
远程模块是通过网络连接到NAOqi的程序。以ALModule为父类创建新类mymodule.cpp。
// mymodule.h
#ifndef MY_MODULE_H
# define MY_MODULE_H
# include <iostream>
# include <alcommon/almodule.h>
namespace AL{
class ALBroker;
}
class MyModule : public AL::ALModule{
public:
MyModule(boost::shared_ptr<AL::ALBroker> broker, const std::string &name);
virtual ~MyModule();
virtual void init();
void printHello();
void printWord(const std::string &word);
bool returnTrue();
};
#endif // MY_MODULE_H
// mymodule.cpp
#include "mymodule.h"
#include <iostream>
#include <alcommon/albroker.h>
MyModule::MyModule(boost::shared_ptr<AL::ALBroker> broker, const std::string& name)
: AL::ALModule(broker, name)
{
……
}
新模块建立后,需要更新CMakelists.txt,将新建的模块添加。
set(<variable_name> <source_file>)
CMakelists.txt
cmake_minimum_required(VERSION 2.8)
project(mymodule)
find_package(qibuild)
set(_srcs mymodule.cpp mymodule.h main.cpp)
qi_create_bin(mybroker ${_srcs})
qi_use_lib(mybroker ALCOMMON ALPROXIES)
在main.cpp中,创建一个broker,将新broker添加到NAOqi的broker中。然后,可以创建自定义模块并将其与刚刚创建的新broker链接。
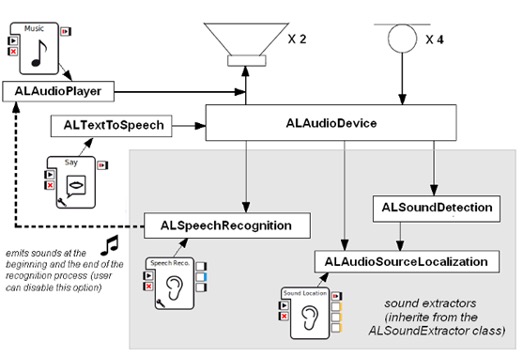
音频处理 ALAudioDevice
ALAudioDevice管理音频的输入和输出,提供了一组操作音频输入设备(麦克风)和输出设备(扬声器)的API。其他的音频模块(ALAudioPlayer除外)做输入和输出时都使用ALAudioDevice提供的API。
ALAudioDevice基于标准的Linux ALSA(Linux声音库)库,通过声音驱动程序,与麦克风和扬声器通信。
ALAudioDevice API 方法名 | 说明 ————————————|——————————————————————————————— enableEnergyComputation() | 允许每个声道计算能量。缺省不计算。 disableEnergyComputation() | 不计算每个声道的能量。 getFrontMicEnergy() | 在允许计算每个声道能量时,返回声道在170ms时间内的平均能量。能量为信号的平方和。 getRearMicEnergy() | 同上 getLeftMicEnergy() | 同上 getRightMicEnergy() | 同上 getParameter(parameter) | 获取参数值,parameter取值为”outputSampleRate”。 getOutputVolume() | 获取系统音量,[0,100]。 muteAudioOut(mute) | mute为True,静音,为False,解除静音 setFileAsInput(fileName) | 通知ALAudioDevice模块,声音输入为从文件读取内容。文件必须为48000Hz、16位、4声道交错数据的WAV文件,fileName为文件的绝对路径名。 startMicrophonesRecording(fileName) | 录音。fileName为文件的绝对路径名,扩展名为wav时,数据存储为16位、48000Hz, 4声道wav文件,扩展名为ogg时,数据存储为16位、16000Hz,1声道ogg文件。 stopMicrophonesRecording() | 停止录音。与startMicrophonesRecording()对应。
输出
1.数据格式 ALAudioDevice可以通过以下帧速率之一将数据发送到扬声器:
- 两声道,交错数据(声道1数据,声道2数据,声道1数据,…),16000Hz(设置亚洲语言时默认);
- 两声道,交错数据,22050Hz(默认设置非亚洲语言时);
- 两声道,交错数据,44100Hz;
- 两声道,交错数据,48000Hz。
2.输出方法
- sendLocalBufferToOutput(nbOfFrames, buffer)
本地模块 (运行在机器人上的模块)将存放在数据缓冲区声音数据发送到扬声器。 数据格式为16位两声道交错数据,缓冲区长度不能超过16384字节。
其中,nbOfFrames 为缓冲区中包括的两声道声音数据帧数。在两声道交错数据格式中,1帧长度为两声道的数据长度,4字节;buffer 为发送缓冲区内存地址。
发送成功方法返回值为真,否则返回值为假。 - sendRemoteBufferToOutput(nbOfFrames, buffer)
远程模块 (运行在机器人之外的模块)将存放在数据缓冲区声音数据发送到扬声器。
任何NAOqi模块都可以在需要时调用适当的方法向NAO的扬声器发送数据。如果数据格式正确,不必做其他配置就可以调用。
3.输出相关方法
- setParameter(parameter,value)设置输出采样率。其中,parameter只能设置为”outputSampleRate”,value为设置的输出采样率,可以设置为16000, 22050, 44100 或 48000。
- setOutputVolume(volume)设置系统的输出音量。其中,volume取值为[0,100]。系统音量可以由getOutputVolume()方法获取。
4.Choregraphe 实例
# 播放WAV文件 (文件内容发送给扬声器)
import math
import os.path
class MyClass(GeneratedClass):
def __init__(self):
GeneratedClass.__init__(self)
self.aad=ALProxy("ALAudioDevice")
def onLoad(self):
pass
def onUnload(self):
pass
def onInput_onStop(self):
self.onUnload()
self.onStopped()
def onInput_onStart(self):
self.aad.setParameter("outputSampleRate",16000)
songPath = "/home/nao/hongdou.wav" #文件为两声道,采样率16000
size=os.path.getsize(songPath)
nframe=(size-44)/4 #帧数,WAV头部为44字节,每帧4字节(两声道,每声道16位)
with open(songPath,"rb") as file:
file.seek(0)
data=file.read()
data=data[44:] #头部以后为数据部分
self.aad.sendLocalBufferToOutput(int(nframe), id(data)) #使用id函数取数据在内存地址
pass
# 生成正弦波并播放
import numpy as np
class MyClass(GeneratedClass):
def __init__(self):
GeneratedClass.__init__(self)
self.aad=ALProxy("ALAudioDevice")
def onLoad(self):
pass
def onUnload(self):
pass
def onInput_onStop(self):
self.onUnload()
self.onStopped()
def onInput_onStart(self):
sineTableSize = 1024
outputBufferSize = 16384
sine=np.arange(sineTableSize,dtype=np.int16)
left_phase = 0
right_phase = 0
nbOfOutputChannels=2
sampleRate = 16000
freq =1000
duration =5.0
fOutputBuffer=np.arange(nbOfOutputChannels*outputBufferSize,
dtype=np.int16)
for i in range(0,sineTableSize):
sine[i]=int(32767 * math.sin((float(i)/float(sineTableSize))*math.pi*2.0))
ratio= 1.0 /( 1.0 / float(freq) * float(sampleRate) / float(sineTableSize))
inc= int(math.ceil(ratio))
nbOfBuffersToSend =int(math.ceil(duration*sampleRate/outputBufferSize))
for d in range(0,nbOfBuffersToSend):
i=0
while i<nbOfOutputChannels*outputBufferSize:
fOutputBuffer[i] =sine[left_phase]
fOutputBuffer[i+1] =sine[right_phase]
left_phase =left_phase+ inc
if left_phase >= sineTableSize:
left_phase =left_phase- sineTableSize
right_phase = right_phase+inc
if right_phase >= sineTableSize :
right_phase =right_phase- sineTableSize
i=i+nbOfOutputChannels
buffer=fOutputBuffer.tostring()
self.aad.sendLocalBufferToOutput(outputBufferSize,id(buffer))
pass
输入
1.订阅ALAudioDevice模块
由于音频数据量非常大,其它的NAOqi模块只有在订阅ALAudioDevice模块时才能够读取麦克风输入的数据,而不会象取传感器值那样随时可以从内存中读到。
请求音频数据的模块首先使用subcribe方法订阅ALAudioDevice模块,并指定其所需数据的格式(通道数,采样率等)。ALAudioDevice模块按照采样参数采样麦克风输入数据,将数据存储在缓冲区中,缓冲区满后通知请求模块读取数据。
订阅相关方法为:
①subscribe(module):订阅ALAudioDevice模块,module为模块名。
订阅ALAudioDevice模块后,请求模块的功能中需要包含一个自动定期调用的方法,处理来自麦克风的原始数据。该方法参数包括通道数、采样率、缓冲区、时间,格式如下:
process(nbOfChannels,nbrOfSamplesByChannel,timeStamp,buffer)
②unsubscribe(module):解除订阅ALAudioDevice模块,module为模块名,方法执行后,将停止请求模块处理数据方法的周期调用。
③setClientPreferences(name,sampleRate, channels,deinterleaved):设置参数。
ALAudioDevice提供下述几种方式的音频数据:
- 四声道,交错数据,48000Hz,170ms缓冲区(默认设置);
- 四声道,非交错数据,48000Hz,170ms缓冲;
- 单声道(前右,前左,后左,后右),16000Hz,170ms缓冲。
在订阅数据之前,需要先使用setClientPreferences方法设置数据格式,参数含义为:
- name为订阅模块名称,必须与subcribe(name)中的名称一致;
- sampleRate为采样率,可以取48000或16000;
- channels取值为0:四通道,1:前右,2:前左,3:后左,4:后右;
- deinterleaved只在多通道时有效,取1时数据为非交错格式。
2.自定义模块处理音频数据
订阅ALAudioDevice模块后,缓冲区满将作为事件与请求模块方法相关联。与前面的处理方式类似,需要将数据处理与指定方法绑定。
3.Choregraphe 测试
同时运行Choregraphe播放正弦波声音和音频处理自定义模块,播放正弦波声音,并通过麦克风输入读取。
class MyClass(GeneratedClass):
def __init__(self):
GeneratedClass.__init__(self)
self.aad=ALProxy("ALAudioDevice")
def onLoad(self):
pass
def onUnload(self):
pass
def onInput_onStart(self):
self.aad.playSine(4000,100,1,10)
pass
def onInput_onStop(self):
self.onUnload()
self.onStopped()
自定义音频处理Python模块
#coding=utf-8
from naoqi import *
import time
import numpy as np
import matplotlib.pyplot as plt
class SoundProcessingModule(ALModule):
def __init__( self, strName):
ALModule.__init__( self, strName );
self.BIND_PYTHON( strName, "processRemote")
self.ALAudioDevice = ALProxy("ALAudioDevice", IP, 9559)
self.isProcessingDone = False
self.nbOfFramesToProcess =1
self.framesCount=0
def startProcessing(self):
self.ALAudioDevice.setClientPreferences(self.getName(), 16000, 3, 0)
self.ALAudioDevice.subscribe(self.getName())
while self.isProcessingDone == False:
time.sleep(1)
self.ALAudioDevice.unsubscribe(self.getName())
def processRemote(self, nbOfChannels, nbOfSamplesByChannel, timeStamp,
inputBuffer):
self.framesCount = self.framesCount + 1;
if (self.framesCount <= self.nbOfFramesToProcess) :
self.dataTreat(inputBuffer)
else :
self.isProcessingDone=True
def dataTreat(self,data):
inputBufferSize=int(len(data)/2)
soundData=np.frombuffer(data,dtype=np.int16)
normalizationData=np.arange(inputBufferSize,dtype=float)
normalizationData=soundData/32768.0
rms=np.sqrt(np.sum(np.power(normalizationData,2)/len(normalizationData)))
print rms
yf=abs(np.fft.fft(normalizationData
yf1=yf[0:int(inputBufferSize/2)]
xf = np.linspace(0,8000, int(inputBufferSize/2))
plt.plot(xf,yf1,'r')
plt.title('FFT',fontsize=7,color='#7A378B')
plt.show()
if __name__ == '__main__':
IP= "192.168.1.170" #将"192.168.1.170"替换成自己机器人IP
pythonBroker = ALBroker("pythonBroker","0.0.0.0",0, IP,9559)
MySoundProcessingModule = SoundProcessingModule("MySoundProcessingModule")
MySoundProcessingModule.startProcessing()
pythonBroker.shutdown()
程序说明:
- 模块执行时通过Broker通告模块及其方法,启动方法startProcessing()完成由self.nbOfFramesToProcess设定数量的帧处理。本例为绘制声音频率曲线,使用了matplotlib库,绘图代码与声音处理无关。由于绘图过程慢,处理帧设置为1。
- 使用ALModule基类的BIND_PYTHON方法将模块处理方法指定为processRemote方法。
- 启动订阅后,每采集一帧数据,调用processRemote方法进行数据处理,处理数据放置在inputBuffer中。当前设置inputBuffer长度是2700字节。
- 声音信号的能量定义为信号的平方和,均方根rms反映了信号能量的大小。
- FFT变换后结果为复数形式,对应傅立叶级数公式中的两个系数,对其求绝对值结果是实部与虚部的平方根。
- 声音处理过程中的参数:
setClientPreferences方法设置的采样方式为单通道、采样率为16000;
最高频率为16000/2=8000Hz(采样定理); 一帧实际数据为2700字节,为1365次采样,一帧对应1365/16000=8.53ms数据;
一帧信号基频为16000/1365=11.72Hz,也就是一次谐波的频率为11.72Hz,二次谐波频率为23.44Hz;
FFT变换结果为对称的,即1365个采样数据,经过变换后得到1365个FFT复数数据,实际只有682个有效数据;每个数据之间的频率差仍为11.72Hz。
自定义音频处理C++模块
要开始编写可处理 NAO 麦克风数据的 NAOqi 模块,请参考C++示例。
编译例程 soundprocessing 模块问题
1.准备工作
为了交叉编译本地模块,使用的操作系统是 Ubuntu 16.04.7 LTS (Xenial Xerus) - 64bits 。
测试机器不是虚拟机,没有使用代理。
NAO 机器人已经正常开机,处于自主生活模式,和计算机处于同一局域网下。
环境配置完全参考了
http://doc.aldebaran.com/2-8/dev/cpp/install_guide.html
C++ SDK 和 Python SDK 都配置完全且可以使用,检验的方法是在本机编译了 http://doc.aldebaran.com/2-8/dev/cpp/examples/core/sayhelloworld/sayhelloworld.html ,它调用了机器人自带的模块。
编译成功后,在终端执行
cd /build-sys-linux_x86_64/sdk/bin
./sayhelloworld 192.168.3.19
结果是机器人说出了 hello world。我认为C++程序编译成功了,可以远程执行,因此工具链配置也是正确的,后面的编译过程类似。
2.soundprocessing 模块编译过程:
源代码来自 http://doc.aldebaran.com/2-8/dev/cpp/examples/audio/soundprocessing/soundprocessing.html#cpp-examples-sound-processing 。在线手册说明了,这是一个远程/本地模块。 解压压缩包之后,在 soundprocessing 目录中执行配置:
$ qibuild configure
提示生成编译目录 /build-sys-linux_x86_64。
然后执行 qibuild make 编译,输出结果
...(报很多warnings,限于篇幅就不贴了)
[100%] Linking CXX executable sdk/bin/soundprocessing
[100%] Built target soundprocessing
提示已经编译成功,产生一个 sdk/bin/soundprocessing 可执行文件。
3.尝试执行程序
进入 /build-sys-linux_x86_64/sdk/bin, 在终端运行这个可执行文件:
cd /build-sys-linux_x86_64/sdk/bin
./soundprocessing
报错:
[I] 1684826244.445762 4667 core.common.toolsmain: ..::: starting alsoundprocessing :::..
[I] 1684826244.445804 4667 core.common.toolsmain: Connecting to 127.0.0.1:9559...
[I] 1684826244.449202 4667 qimessaging.session: Session listener created on
tcp://0.0.0.0:0
[I] 1684826244.449651 4667 qimessaging.transportserver: TransportServer will listen on:
tcp://127.0.0.1:34389
[I] 1684826244.449671 4667 qimessaging.transportserver: TransportServer will listen on:
tcp://192.168.3.20:34389
[E] 1684826244.450429 4667 core.common.toolsmain: Failed to connect to broker at
127.0.0.1:9559
[E] 1684826244.450454 4667 core.common.toolsmain: alsoundprocessing exit
或者使用
./soundprocessing 192.168.3.19 或
./soundprocessing 192.168.3.19:9559
报错也是类似的。暂时不清楚这个错误的含义。 示例代码的文件夹还提供了一个python脚本,意思应该是测试这个声音处理模块,于是尝试执行这个脚本。 /soundprocessing/MySoundProcessingModuleTest.py
# -*- coding: utf-8 -*-
"""
UnitTests for ALSoundProcessing Module
"""
from naoqi import ALProxy
IP = "192.168.3.19" # 我的NAO机器人IP
PORT = 9559
if __name__ == "__main__":
proxy = ALProxy("ALSoundProcessing", IP, PORT)
proxy.subscribe("MyModule")
注意这里的IP地址已经改成NAO的IP,在 /soundprocessing/tests/ 目录下,执行提供的测试脚本,结果似乎提示找不到自定义的 ALSoundProcessing
$ python ./MySoundProcessingModuleTest.py
[W] 1684757167.823390 25761 qi.path.sdklayout: No Application was created, trying to deduce paths
[I] 1684757167.825496 25761 qimessaging.session: Session listener created on
tcp://0.0.0.0:0
[I] 1684757167.825802 25761 qimessaging.transportserver: TransportServer will listen on:
tcp://127.0.0.1:32769
[I] 1684757167.825814 25761 qimessaging.transportserver: TransportServer will listen on:
tcp://192.168.3.20:32769
Traceback (most recent call last):
File "./MySoundProcessingModuleTest.py", line 14, in <module>
proxy = ALProxy("ALSoundProcessing", IP, PORT)
File "/home/nao/Downloads/pynaoqi/lib/python2.7/site-packages/naoqi.py", line 237, in __init__
inaoqi.proxy.__init__(self, args[0], args[1], args[2])
File "/home/nao/Downloads/pynaoqi/lib/python2.7/site-packages/inaoqi.py", line 464, in __init__
this = _inaoqi.new_proxy(*args)
RuntimeError: ALProxy::ALProxy
Can't find service: ALSoundProcessing
4. 继续尝试编译本地模块
由于远程执行报错找不到定义的 ALSoundProcessing 模块,因此尝试了编译本地模块的办法。 由于 2-5、2-8 版本的在线手册都没有提到本地模块的编译方法,这里参考了 2-1 版本手册的内容:http://doc.aldebaran.com/2-1/dev/cpp/tutos/create_module.html,模块的类型是远程还是本地,似乎是由 CMakeList.txt 里面的宏定义 XXXX_IS_REMOTE 决定的。
将 CMakeList.txt 中第7行
option(SOUNDPROCESSING_IS_REMOTE
"module is compiled as a remote module (ON or OFF)"
ON)
中的 ON 改为 OFF,然后再次编译
qibuild configure
qibuild make
提示生成了库文件 sdk/lib/naoqi/libsoundprocessing.so
然后用ssh拷贝整个/soundprocessing目录到NAO机器人中,存放目录为 /home/nao/test_cpp_202305
然后修改 /home/nao/naoqi/preferences/autoload.ini ,添加 libsoundprocessing.so 的完整路径
/home/nao/test_cpp_202305/soundprocessing/build-sys-linux_x86_64/sdk/lib/naoqi/libsoundprocessing.so
修改后的autoload.ini 为
# autoload.ini
#
# Use this file to list the cross-compiled modules that you wish to load.
# You must specify the full path to the module, python module or program.
[user]
#the/full/path/to/your/liblibraryname.so # load liblibraryname.so
/home/nao/test_cpp_202305/soundprocessing/build-sys-linux_x86_64/
sdk/lib/naoqi/libsoundprocessing.so
[python]
#the/full/path/to/your/python_module.py # load python_module.py
[program]
#the/full/path/to/your/program # load program
然后ssh在NAO机器人终端执行
nao restart
让 auto.ini 生效,等待NAO重新开机完毕。
5.尝试启动本地模块
然后在NAO机器人的ssh终端进入 /test_cpp_202305/soundprocessing/tests 目录 ,修改MySoundProcessingModuleTest.py 中 IP 地址为127.0.0.1,然后执行 输出结果
nao [0] /data/home/nao/test_cpp_202305/soundprocessing/tests $ python MySoundProcessingModuleTest.py
Traceback (most recent call last):
File "MySoundProcessingModuleTest.py", line 14, in <module>
proxy = ALProxy("ALSoundProcessing", IP, PORT)
File "/opt/aldebaran/lib/python2.7/site-packages/naoqi.py", line 237, in __init__
inaoqi.proxy.__init__(self, args[0], args[1], args[2])
File "/opt/aldebaran/lib/python2.7/site-packages/inaoqi.py", line 464, in __init__
this = _inaoqi.new_proxy(*args)
RuntimeError: ALProxy::ALProxy
Can't find service: ALSoundProcessing
似乎仍然提示找不到自定义的 ALSoundProcessing。
sudo reboot
之后报错相同。